Coursera
Ungraded Lab: Fully Convolutional Neural Networks for Image Segmentation
This notebook illustrates how to build a Fully Convolutional Neural Network for semantic image segmentation.
You will train the model on a custom dataset prepared by divamgupta. This contains video frames from a moving vehicle and is a subsample of the CamVid dataset.
You will be using a pretrained VGG-16 network for the feature extraction path, then followed by an FCN-8 network for upsampling and generating the predictions. The output will be a label map (i.e. segmentation mask) with predictions for 12 classes. Let’s begin!
Imports
import os
import zipfile
import PIL.Image, PIL.ImageFont, PIL.ImageDraw
import numpy as np
try:
# %tensorflow_version only exists in Colab.
%tensorflow_version 2.x
except Exception:
pass
import tensorflow as tf
from matplotlib import pyplot as plt
import tensorflow_datasets as tfds
import seaborn as sns
print("Tensorflow version " + tf.__version__)
Colab only includes TensorFlow 2.x; %tensorflow_version has no effect.
Tensorflow version 2.13.0
Download the Dataset
We hosted the dataset in a Google bucket so you will need to download it first and unzip to a local directory.
# download the dataset (zipped file)
!gdown --id 0B0d9ZiqAgFkiOHR1NTJhWVJMNEU -O /tmp/fcnn-dataset.zip
/usr/local/lib/python3.10/dist-packages/gdown/cli.py:121: FutureWarning: Option `--id` was deprecated in version 4.3.1 and will be removed in 5.0. You don't need to pass it anymore to use a file ID.
warnings.warn(
Downloading...
From: https://drive.google.com/uc?id=0B0d9ZiqAgFkiOHR1NTJhWVJMNEU
To: /tmp/fcnn-dataset.zip
100% 126M/126M [00:03<00:00, 35.0MB/s]
Troubleshooting: If you get a download error saying “Cannot retrieve the public link of the file.”, please run the next two cells below to download the dataset. Otherwise, please skip them.
%%writefile download.sh
#!/bin/bash
fileid="0B0d9ZiqAgFkiOHR1NTJhWVJMNEU"
filename="/tmp/fcnn-dataset.zip"
html=`curl -c ./cookie -s -L "https://drive.google.com/uc?export=download&id=${fileid}"`
curl -Lb ./cookie "https://drive.google.com/uc?export=download&`echo ${html}|grep -Po '(confirm=[a-zA-Z0-9\-_]+)'`&id=${fileid}" -o ${filename}
Writing download.sh
# NOTE: Please only run this if downloading with gdown did not work.
# This will run the script created above.
!bash download.sh
% Total % Received % Xferd Average Speed Time Time Time Current
Dload Upload Total Spent Left Speed
0 0 0 0 0 0 0 0 --:--:-- --:--:-- --:--:-- 0
100 119M 100 119M 0 0 75.1M 0 0:00:01 0:00:01 --:--:-- 147M
You can extract the downloaded zip files with this code:
# extract the downloaded dataset to a local directory: /tmp/fcnn
local_zip = '/tmp/fcnn-dataset.zip'
zip_ref = zipfile.ZipFile(local_zip, 'r')
zip_ref.extractall('/tmp/fcnn')
zip_ref.close()
The dataset you just downloaded contains folders for images and annotations. The images contain the video frames while the annotations contain the pixel-wise label maps. Each label map has the shape (height, width , 1) with each point in this space denoting the corresponding pixel’s class. Classes are in the range [0, 11] (i.e. 12 classes) and the pixel labels correspond to these classes:
| Value | Class Name |
|---|---|
| 0 | sky |
| 1 | building |
| 2 | column/pole |
| 3 | road |
| 4 | side walk |
| 5 | vegetation |
| 6 | traffic light |
| 7 | fence |
| 8 | vehicle |
| 9 | pedestrian |
| 10 | byciclist |
| 11 | void |
For example, if a pixel is part of a road, then that point will be labeled 3 in the label map. Run the cell below to create a list containing the class names:
- Note: bicyclist is mispelled as ‘byciclist’ in the dataset. We won’t handle data cleaning in this example, but you can inspect and clean the data if you want to use this as a starting point for a personal project.
# pixel labels in the video frames
class_names = ['sky', 'building','column/pole', 'road', 'side walk', 'vegetation', 'traffic light', 'fence', 'vehicle', 'pedestrian', 'byciclist', 'void']
Load and Prepare the Dataset
Next, you will load and prepare the train and validation sets for training. There are some preprocessing steps needed before the data is fed to the model. These include:
- resizing the height and width of the input images and label maps (224 x 224px by default)
- normalizing the input images’ pixel values to fall in the range
[-1, 1] - reshaping the label maps from
(height, width, 1)to(height, width, 12)with each slice along the third axis having1if it belongs to the class corresponding to that slice’s index else0. For example, if a pixel is part of a road, then using the table above, that point at slice #3 will be labeled1and it will be0in all other slices. To illustrate using simple arrays:
# if we have a label map with 3 classes...
n_classes = 3
# and this is the original annotation...
orig_anno = [0 1 2]
# then the reshaped annotation will have 3 slices and its contents will look like this:
reshaped_anno = [1 0 0][0 1 0][0 0 1]
The following function will do the preprocessing steps mentioned above.
def map_filename_to_image_and_mask(t_filename, a_filename, height=224, width=224):
'''
Preprocesses the dataset by:
* resizing the input image and label maps
* normalizing the input image pixels
* reshaping the label maps from (height, width, 1) to (height, width, 12)
Args:
t_filename (string) -- path to the raw input image
a_filename (string) -- path to the raw annotation (label map) file
height (int) -- height in pixels to resize to
width (int) -- width in pixels to resize to
Returns:
image (tensor) -- preprocessed image
annotation (tensor) -- preprocessed annotation
'''
# Convert image and mask files to tensors
img_raw = tf.io.read_file(t_filename)
anno_raw = tf.io.read_file(a_filename)
image = tf.image.decode_jpeg(img_raw)
annotation = tf.image.decode_jpeg(anno_raw)
# Resize image and segmentation mask
image = tf.image.resize(image, (height, width,))
annotation = tf.image.resize(annotation, (height, width,))
image = tf.reshape(image, (height, width, 3,))
annotation = tf.cast(annotation, dtype=tf.int32)
annotation = tf.reshape(annotation, (height, width, 1,))
stack_list = []
# Reshape segmentation masks
for c in range(len(class_names)):
mask = tf.equal(annotation[:,:,0], tf.constant(c))
stack_list.append(tf.cast(mask, dtype=tf.int32))
annotation = tf.stack(stack_list, axis=2)
# Normalize pixels in the input image
image = image/127.5
image -= 1
return image, annotation
The dataset also already has separate folders for train and test sets. As described earlier, these sets will have two folders: one corresponding to the images, and the other containing the annotations.
# show folders inside the dataset you downloaded
!ls /tmp/fcnn/dataset1
annotations_prepped_test images_prepped_test
annotations_prepped_train images_prepped_train
You will use the following functions to create the tensorflow datasets from the images in these folders. Notice that before creating the batches in the get_training_dataset() and get_validation_set(), the images are first preprocessed using the map_filename_to_image_and_mask() function you defined earlier.
# Utilities for preparing the datasets
BATCH_SIZE = 64
def get_dataset_slice_paths(image_dir, label_map_dir):
'''
generates the lists of image and label map paths
Args:
image_dir (string) -- path to the input images directory
label_map_dir (string) -- path to the label map directory
Returns:
image_paths (list of strings) -- paths to each image file
label_map_paths (list of strings) -- paths to each label map
'''
image_file_list = os.listdir(image_dir)
label_map_file_list = os.listdir(label_map_dir)
image_paths = [os.path.join(image_dir, fname) for fname in image_file_list]
label_map_paths = [os.path.join(label_map_dir, fname) for fname in label_map_file_list]
return image_paths, label_map_paths
def get_training_dataset(image_paths, label_map_paths):
'''
Prepares shuffled batches of the training set.
Args:
image_paths (list of strings) -- paths to each image file in the train set
label_map_paths (list of strings) -- paths to each label map in the train set
Returns:
tf Dataset containing the preprocessed train set
'''
training_dataset = tf.data.Dataset.from_tensor_slices((image_paths, label_map_paths))
training_dataset = training_dataset.map(map_filename_to_image_and_mask)
training_dataset = training_dataset.shuffle(100, reshuffle_each_iteration=True)
training_dataset = training_dataset.batch(BATCH_SIZE)
training_dataset = training_dataset.repeat()
training_dataset = training_dataset.prefetch(-1)
return training_dataset
def get_validation_dataset(image_paths, label_map_paths):
'''
Prepares batches of the validation set.
Args:
image_paths (list of strings) -- paths to each image file in the val set
label_map_paths (list of strings) -- paths to each label map in the val set
Returns:
tf Dataset containing the preprocessed validation set
'''
validation_dataset = tf.data.Dataset.from_tensor_slices((image_paths, label_map_paths))
validation_dataset = validation_dataset.map(map_filename_to_image_and_mask)
validation_dataset = validation_dataset.batch(BATCH_SIZE)
validation_dataset = validation_dataset.repeat()
return validation_dataset
You can now generate the training and validation sets by running the cell below.
# get the paths to the images
training_image_paths, training_label_map_paths = get_dataset_slice_paths('/tmp/fcnn/dataset1/images_prepped_train/','/tmp/fcnn/dataset1/annotations_prepped_train/')
validation_image_paths, validation_label_map_paths = get_dataset_slice_paths('/tmp/fcnn/dataset1/images_prepped_test/','/tmp/fcnn/dataset1/annotations_prepped_test/')
# generate the train and val sets
training_dataset = get_training_dataset(training_image_paths, training_label_map_paths)
validation_dataset = get_validation_dataset(validation_image_paths, validation_label_map_paths)
Let’s Take a Look at the Dataset
You will also need utilities to help visualize the dataset and the model predictions later. First, you need to assign a color mapping to the classes in the label maps. Since our dataset has 12 classes, you need to have a list of 12 colors. We can use the color_palette() from Seaborn to generate this.
# generate a list that contains one color for each class
colors = sns.color_palette(None, len(class_names))
# print class name - normalized RGB tuple pairs
# the tuple values will be multiplied by 255 in the helper functions later
# to convert to the (0,0,0) to (255,255,255) RGB values you might be familiar with
for class_name, color in zip(class_names, colors):
print(f'{class_name} -- {color}')
sky -- (0.12156862745098039, 0.4666666666666667, 0.7058823529411765)
building -- (1.0, 0.4980392156862745, 0.054901960784313725)
column/pole -- (0.17254901960784313, 0.6274509803921569, 0.17254901960784313)
road -- (0.8392156862745098, 0.15294117647058825, 0.1568627450980392)
side walk -- (0.5803921568627451, 0.403921568627451, 0.7411764705882353)
vegetation -- (0.5490196078431373, 0.33725490196078434, 0.29411764705882354)
traffic light -- (0.8901960784313725, 0.4666666666666667, 0.7607843137254902)
fence -- (0.4980392156862745, 0.4980392156862745, 0.4980392156862745)
vehicle -- (0.7372549019607844, 0.7411764705882353, 0.13333333333333333)
pedestrian -- (0.09019607843137255, 0.7450980392156863, 0.8117647058823529)
byciclist -- (0.12156862745098039, 0.4666666666666667, 0.7058823529411765)
void -- (1.0, 0.4980392156862745, 0.054901960784313725)
# Visualization Utilities
def fuse_with_pil(images):
'''
Creates a blank image and pastes input images
Args:
images (list of numpy arrays) - numpy array representations of the images to paste
Returns:
PIL Image object containing the images
'''
widths = (image.shape[1] for image in images)
heights = (image.shape[0] for image in images)
total_width = sum(widths)
max_height = max(heights)
new_im = PIL.Image.new('RGB', (total_width, max_height))
x_offset = 0
for im in images:
pil_image = PIL.Image.fromarray(np.uint8(im))
new_im.paste(pil_image, (x_offset,0))
x_offset += im.shape[1]
return new_im
def give_color_to_annotation(annotation):
'''
Converts a 2-D annotation to a numpy array with shape (height, width, 3) where
the third axis represents the color channel. The label values are multiplied by
255 and placed in this axis to give color to the annotation
Args:
annotation (numpy array) - label map array
Returns:
the annotation array with an additional color channel/axis
'''
seg_img = np.zeros( (annotation.shape[0],annotation.shape[1], 3) ).astype('float')
for c in range(12):
segc = (annotation == c)
seg_img[:,:,0] += segc*( colors[c][0] * 255.0)
seg_img[:,:,1] += segc*( colors[c][1] * 255.0)
seg_img[:,:,2] += segc*( colors[c][2] * 255.0)
return seg_img
def show_predictions(image, labelmaps, titles, iou_list, dice_score_list):
'''
Displays the images with the ground truth and predicted label maps
Args:
image (numpy array) -- the input image
labelmaps (list of arrays) -- contains the predicted and ground truth label maps
titles (list of strings) -- display headings for the images to be displayed
iou_list (list of floats) -- the IOU values for each class
dice_score_list (list of floats) -- the Dice Score for each vlass
'''
true_img = give_color_to_annotation(labelmaps[1])
pred_img = give_color_to_annotation(labelmaps[0])
image = image + 1
image = image * 127.5
images = np.uint8([image, pred_img, true_img])
metrics_by_id = [(idx, iou, dice_score) for idx, (iou, dice_score) in enumerate(zip(iou_list, dice_score_list)) if iou > 0.0]
metrics_by_id.sort(key=lambda tup: tup[1], reverse=True) # sorts in place
display_string_list = ["{}: IOU: {} Dice Score: {}".format(class_names[idx], iou, dice_score) for idx, iou, dice_score in metrics_by_id]
display_string = "\n\n".join(display_string_list)
plt.figure(figsize=(15, 4))
for idx, im in enumerate(images):
plt.subplot(1, 3, idx+1)
if idx == 1:
plt.xlabel(display_string)
plt.xticks([])
plt.yticks([])
plt.title(titles[idx], fontsize=12)
plt.imshow(im)
def show_annotation_and_image(image, annotation):
'''
Displays the image and its annotation side by side
Args:
image (numpy array) -- the input image
annotation (numpy array) -- the label map
'''
new_ann = np.argmax(annotation, axis=2)
seg_img = give_color_to_annotation(new_ann)
image = image + 1
image = image * 127.5
image = np.uint8(image)
images = [image, seg_img]
images = [image, seg_img]
fused_img = fuse_with_pil(images)
plt.imshow(fused_img)
def list_show_annotation(dataset):
'''
Displays images and its annotations side by side
Args:
dataset (tf Dataset) - batch of images and annotations
'''
ds = dataset.unbatch()
ds = ds.shuffle(buffer_size=100)
plt.figure(figsize=(25, 15))
plt.title("Images And Annotations")
plt.subplots_adjust(bottom=0.1, top=0.9, hspace=0.05)
# we set the number of image-annotation pairs to 9
# feel free to make this a function parameter if you want
for idx, (image, annotation) in enumerate(ds.take(9)):
plt.subplot(3, 3, idx + 1)
plt.yticks([])
plt.xticks([])
show_annotation_and_image(image.numpy(), annotation.numpy())
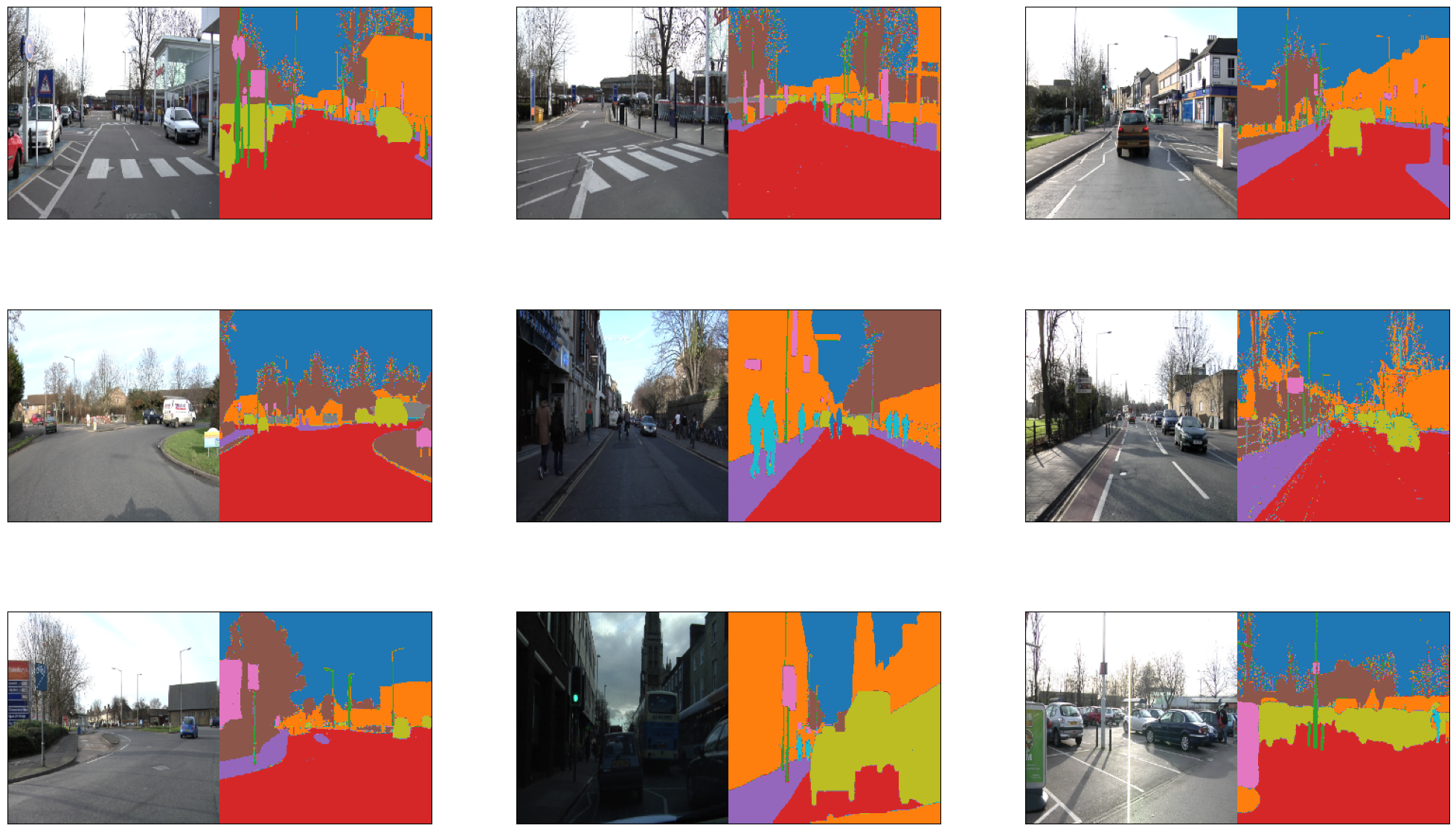
Please run the cells below to see sample images from the train and validation sets. You will see the image and the label maps side side by side.
list_show_annotation(training_dataset)
<ipython-input-12-f84c3eb68ddb>:129: MatplotlibDeprecationWarning: Auto-removal of overlapping axes is deprecated since 3.6 and will be removed two minor releases later; explicitly call ax.remove() as needed.
plt.subplot(3, 3, idx + 1)
list_show_annotation(validation_dataset)
<ipython-input-12-f84c3eb68ddb>:129: MatplotlibDeprecationWarning: Auto-removal of overlapping axes is deprecated since 3.6 and will be removed two minor releases later; explicitly call ax.remove() as needed.
plt.subplot(3, 3, idx + 1)

Define the Model
You will now build the model and prepare it for training. AS mentioned earlier, this will use a VGG-16 network for the encoder and FCN-8 for the decoder. This is the diagram as shown in class:
For this exercise, you will notice a slight difference from the lecture because the dataset images are 224x224 instead of 32x32. You’ll see how this is handled in the next cells as you build the encoder.
Define Pooling Block of VGG
As you saw in Course 1 of this specialization, VGG networks have repeating blocks so to make the code neat, it’s best to create a function to encapsulate this process. Each block has convolutional layers followed by a max pooling layer which downsamples the image.
def block(x, n_convs, filters, kernel_size, activation, pool_size, pool_stride, block_name):
'''
Defines a block in the VGG network.
Args:
x (tensor) -- input image
n_convs (int) -- number of convolution layers to append
filters (int) -- number of filters for the convolution layers
activation (string or object) -- activation to use in the convolution
pool_size (int) -- size of the pooling layer
pool_stride (int) -- stride of the pooling layer
block_name (string) -- name of the block
Returns:
tensor containing the max-pooled output of the convolutions
'''
for i in range(n_convs):
x = tf.keras.layers.Conv2D(filters=filters, kernel_size=kernel_size, activation=activation, padding='same', name="{}_conv{}".format(block_name, i + 1))(x)
x = tf.keras.layers.MaxPooling2D(pool_size=pool_size, strides=pool_stride, name="{}_pool{}".format(block_name, i+1 ))(x)
return x
Download VGG weights
First, please run the cell below to get pre-trained weights for VGG-16. You will load this in the next section when you build the encoder network.
# download the weights
!wget https://github.com/fchollet/deep-learning-models/releases/download/v0.1/vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5
# assign to a variable
vgg_weights_path = "vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5"
--2023-10-04 15:05:37-- https://github.com/fchollet/deep-learning-models/releases/download/v0.1/vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5
Resolving github.com (github.com)... 140.82.114.4
Connecting to github.com (github.com)|140.82.114.4|:443... connected.
HTTP request sent, awaiting response... 302 Found
Location: https://objects.githubusercontent.com/github-production-release-asset-2e65be/64878964/b09fedd4-5983-11e6-8f9f-904ea400969a?X-Amz-Algorithm=AWS4-HMAC-SHA256&X-Amz-Credential=AKIAIWNJYAX4CSVEH53A%2F20231004%2Fus-east-1%2Fs3%2Faws4_request&X-Amz-Date=20231004T150537Z&X-Amz-Expires=300&X-Amz-Signature=c573264bf3d53a85c17d7a819297b2b8323d606687903ab82375cf1fcc62ab4c&X-Amz-SignedHeaders=host&actor_id=0&key_id=0&repo_id=64878964&response-content-disposition=attachment%3B%20filename%3Dvgg16_weights_tf_dim_ordering_tf_kernels_notop.h5&response-content-type=application%2Foctet-stream [following]
--2023-10-04 15:05:37-- https://objects.githubusercontent.com/github-production-release-asset-2e65be/64878964/b09fedd4-5983-11e6-8f9f-904ea400969a?X-Amz-Algorithm=AWS4-HMAC-SHA256&X-Amz-Credential=AKIAIWNJYAX4CSVEH53A%2F20231004%2Fus-east-1%2Fs3%2Faws4_request&X-Amz-Date=20231004T150537Z&X-Amz-Expires=300&X-Amz-Signature=c573264bf3d53a85c17d7a819297b2b8323d606687903ab82375cf1fcc62ab4c&X-Amz-SignedHeaders=host&actor_id=0&key_id=0&repo_id=64878964&response-content-disposition=attachment%3B%20filename%3Dvgg16_weights_tf_dim_ordering_tf_kernels_notop.h5&response-content-type=application%2Foctet-stream
Resolving objects.githubusercontent.com (objects.githubusercontent.com)... 185.199.108.133, 185.199.109.133, 185.199.110.133, ...
Connecting to objects.githubusercontent.com (objects.githubusercontent.com)|185.199.108.133|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 58889256 (56M) [application/octet-stream]
Saving to: ‘vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5’
vgg16_weights_tf_di 100%[===================>] 56.16M 56.6MB/s in 1.0s
2023-10-04 15:05:38 (56.6 MB/s) - ‘vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5’ saved [58889256/58889256]
Define VGG-16
You can build the encoder as shown below.
- You will create 5 blocks with increasing number of filters at each stage.
- The number of convolutions, filters, kernel size, activation, pool size and pool stride will remain constant.
- You will load the pretrained weights after creating the VGG 16 network.
- Additional convolution layers will be appended to extract more features.
- The output will contain the output of the last layer and the previous four convolution blocks.
def VGG_16(image_input):
'''
This function defines the VGG encoder.
Args:
image_input (tensor) - batch of images
Returns:
tuple of tensors - output of all encoder blocks plus the final convolution layer
'''
# create 5 blocks with increasing filters at each stage.
# you will save the output of each block (i.e. p1, p2, p3, p4, p5). "p" stands for the pooling layer.
x = block(image_input,n_convs=2, filters=64, kernel_size=(3,3), activation='relu',pool_size=(2,2), pool_stride=(2,2), block_name='block1')
p1= x
x = block(x,n_convs=2, filters=128, kernel_size=(3,3), activation='relu',pool_size=(2,2), pool_stride=(2,2), block_name='block2')
p2 = x
x = block(x,n_convs=3, filters=256, kernel_size=(3,3), activation='relu',pool_size=(2,2), pool_stride=(2,2), block_name='block3')
p3 = x
x = block(x,n_convs=3, filters=512, kernel_size=(3,3), activation='relu',pool_size=(2,2), pool_stride=(2,2), block_name='block4')
p4 = x
x = block(x,n_convs=3, filters=512, kernel_size=(3,3), activation='relu',pool_size=(2,2), pool_stride=(2,2), block_name='block5')
p5 = x
# create the vgg model
vgg = tf.keras.Model(image_input , p5)
# load the pretrained weights you downloaded earlier
vgg.load_weights(vgg_weights_path)
# number of filters for the output convolutional layers
n = 4096
# our input images are 224x224 pixels so they will be downsampled to 7x7 after the pooling layers above.
# we can extract more features by chaining two more convolution layers.
c6 = tf.keras.layers.Conv2D( n , ( 7 , 7 ) , activation='relu' , padding='same', name="conv6")(p5)
c7 = tf.keras.layers.Conv2D( n , ( 1 , 1 ) , activation='relu' , padding='same', name="conv7")(c6)
# return the outputs at each stage. you will only need two of these in this particular exercise
# but we included it all in case you want to experiment with other types of decoders.
return (p1, p2, p3, p4, c7)
Define FCN 8 Decoder
Next, you will build the decoder using deconvolution layers. Please refer to the diagram for FCN-8 at the start of this section to visualize what the code below is doing. It will involve two summations before upsampling to the original image size and generating the predicted mask.
def fcn8_decoder(convs, n_classes):
'''
Defines the FCN 8 decoder.
Args:
convs (tuple of tensors) - output of the encoder network
n_classes (int) - number of classes
Returns:
tensor with shape (height, width, n_classes) containing class probabilities
'''
# unpack the output of the encoder
f1, f2, f3, f4, f5 = convs
# upsample the output of the encoder then crop extra pixels that were introduced
o = tf.keras.layers.Conv2DTranspose(n_classes , kernel_size=(4,4) , strides=(2,2) , use_bias=False )(f5)
o = tf.keras.layers.Cropping2D(cropping=(1,1))(o)
# load the pool 4 prediction and do a 1x1 convolution to reshape it to the same shape of `o` above
o2 = f4
o2 = ( tf.keras.layers.Conv2D(n_classes , ( 1 , 1 ) , activation='relu' , padding='same'))(o2)
# add the results of the upsampling and pool 4 prediction
o = tf.keras.layers.Add()([o, o2])
# upsample the resulting tensor of the operation you just did
o = (tf.keras.layers.Conv2DTranspose( n_classes , kernel_size=(4,4) , strides=(2,2) , use_bias=False ))(o)
o = tf.keras.layers.Cropping2D(cropping=(1, 1))(o)
# load the pool 3 prediction and do a 1x1 convolution to reshape it to the same shape of `o` above
o2 = f3
o2 = ( tf.keras.layers.Conv2D(n_classes , ( 1 , 1 ) , activation='relu' , padding='same'))(o2)
# add the results of the upsampling and pool 3 prediction
o = tf.keras.layers.Add()([o, o2])
# upsample up to the size of the original image
o = tf.keras.layers.Conv2DTranspose(n_classes , kernel_size=(8,8) , strides=(8,8) , use_bias=False )(o)
# append a softmax to get the class probabilities
o = (tf.keras.layers.Activation('softmax'))(o)
return o
Define Final Model
You can now build the final model by connecting the encoder and decoder blocks.
def segmentation_model():
'''
Defines the final segmentation model by chaining together the encoder and decoder.
Returns:
keras Model that connects the encoder and decoder networks of the segmentation model
'''
inputs = tf.keras.layers.Input(shape=(224,224,3,))
convs = VGG_16(image_input=inputs)
outputs = fcn8_decoder(convs, 12)
model = tf.keras.Model(inputs=inputs, outputs=outputs)
return model
# instantiate the model and see how it looks
model = segmentation_model()
model.summary()
Model: "model_1"
__________________________________________________________________________________________________
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_1 (InputLayer) [(None, 224, 224, 3)] 0 []
block1_conv1 (Conv2D) (None, 224, 224, 64) 1792 ['input_1[0][0]']
block1_conv2 (Conv2D) (None, 224, 224, 64) 36928 ['block1_conv1[0][0]']
block1_pool2 (MaxPooling2D (None, 112, 112, 64) 0 ['block1_conv2[0][0]']
)
block2_conv1 (Conv2D) (None, 112, 112, 128) 73856 ['block1_pool2[0][0]']
block2_conv2 (Conv2D) (None, 112, 112, 128) 147584 ['block2_conv1[0][0]']
block2_pool2 (MaxPooling2D (None, 56, 56, 128) 0 ['block2_conv2[0][0]']
)
block3_conv1 (Conv2D) (None, 56, 56, 256) 295168 ['block2_pool2[0][0]']
block3_conv2 (Conv2D) (None, 56, 56, 256) 590080 ['block3_conv1[0][0]']
block3_conv3 (Conv2D) (None, 56, 56, 256) 590080 ['block3_conv2[0][0]']
block3_pool3 (MaxPooling2D (None, 28, 28, 256) 0 ['block3_conv3[0][0]']
)
block4_conv1 (Conv2D) (None, 28, 28, 512) 1180160 ['block3_pool3[0][0]']
block4_conv2 (Conv2D) (None, 28, 28, 512) 2359808 ['block4_conv1[0][0]']
block4_conv3 (Conv2D) (None, 28, 28, 512) 2359808 ['block4_conv2[0][0]']
block4_pool3 (MaxPooling2D (None, 14, 14, 512) 0 ['block4_conv3[0][0]']
)
block5_conv1 (Conv2D) (None, 14, 14, 512) 2359808 ['block4_pool3[0][0]']
block5_conv2 (Conv2D) (None, 14, 14, 512) 2359808 ['block5_conv1[0][0]']
block5_conv3 (Conv2D) (None, 14, 14, 512) 2359808 ['block5_conv2[0][0]']
block5_pool3 (MaxPooling2D (None, 7, 7, 512) 0 ['block5_conv3[0][0]']
)
conv6 (Conv2D) (None, 7, 7, 4096) 1027645 ['block5_pool3[0][0]']
44
conv7 (Conv2D) (None, 7, 7, 4096) 1678131 ['conv6[0][0]']
2
conv2d_transpose (Conv2DTr (None, 16, 16, 12) 786432 ['conv7[0][0]']
anspose)
cropping2d (Cropping2D) (None, 14, 14, 12) 0 ['conv2d_transpose[0][0]']
conv2d (Conv2D) (None, 14, 14, 12) 6156 ['block4_pool3[0][0]']
add (Add) (None, 14, 14, 12) 0 ['cropping2d[0][0]',
'conv2d[0][0]']
conv2d_transpose_1 (Conv2D (None, 30, 30, 12) 2304 ['add[0][0]']
Transpose)
cropping2d_1 (Cropping2D) (None, 28, 28, 12) 0 ['conv2d_transpose_1[0][0]']
conv2d_1 (Conv2D) (None, 28, 28, 12) 3084 ['block3_pool3[0][0]']
add_1 (Add) (None, 28, 28, 12) 0 ['cropping2d_1[0][0]',
'conv2d_1[0][0]']
conv2d_transpose_2 (Conv2D (None, 224, 224, 12) 9216 ['add_1[0][0]']
Transpose)
activation (Activation) (None, 224, 224, 12) 0 ['conv2d_transpose_2[0][0]']
==================================================================================================
Total params: 135067736 (515.24 MB)
Trainable params: 135067736 (515.24 MB)
Non-trainable params: 0 (0.00 Byte)
__________________________________________________________________________________________________
Compile the Model
Next, the model will be configured for training. You will need to specify the loss, optimizer and metrics. You will use categorical_crossentropy as the loss function since the label map is transformed to one hot encoded vectors for each pixel in the image (i.e. 1 in one slice and 0 for other slices as described earlier).
sgd = tf.keras.optimizers.SGD(lr=1E-2, momentum=0.9, nesterov=True)
model.compile(loss='categorical_crossentropy',
optimizer=sgd,
metrics=['accuracy'])
WARNING:absl:`lr` is deprecated in Keras optimizer, please use `learning_rate` or use the legacy optimizer, e.g.,tf.keras.optimizers.legacy.SGD.
Train the Model
The model can now be trained. This will take around 30 minutes to run and you will reach around 85% accuracy for both train and val sets.
# number of training images
train_count = 367
# number of validation images
validation_count = 101
EPOCHS = 170
steps_per_epoch = train_count//BATCH_SIZE
validation_steps = validation_count//BATCH_SIZE
history = model.fit(training_dataset,
steps_per_epoch=steps_per_epoch, validation_data=validation_dataset, validation_steps=validation_steps, epochs=EPOCHS)
Epoch 1/170
5/5 [==============================] - 54s 2s/step - loss: 2.6120 - accuracy: 0.0832 - val_loss: 2.4889 - val_accuracy: 0.0828
Epoch 2/170
ERROR:root:Internal Python error in the inspect module.
Below is the traceback from this internal error.
Traceback (most recent call last):
File "/usr/local/lib/python3.10/dist-packages/IPython/core/interactiveshell.py", line 3553, in run_code
exec(code_obj, self.user_global_ns, self.user_ns)
File "<ipython-input-22-1380ed8ec56a>", line 12, in <cell line: 12>
history = model.fit(training_dataset,
File "/usr/local/lib/python3.10/dist-packages/keras/src/utils/traceback_utils.py", line 65, in error_handler
return fn(*args, **kwargs)
File "/usr/local/lib/python3.10/dist-packages/keras/src/engine/training.py", line 1742, in fit
tmp_logs = self.train_function(iterator)
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/util/traceback_utils.py", line 150, in error_handler
return fn(*args, **kwargs)
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/polymorphic_function.py", line 825, in __call__
result = self._call(*args, **kwds)
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/polymorphic_function.py", line 857, in _call
return self._no_variable_creation_fn(*args, **kwds) # pylint: disable=not-callable
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/tracing_compiler.py", line 148, in __call__
return concrete_function._call_flat(
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/monomorphic_function.py", line 1349, in _call_flat
return self._build_call_outputs(self._inference_function(*args))
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/atomic_function.py", line 196, in __call__
outputs = self._bound_context.call_function(
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/context.py", line 1457, in call_function
outputs = execute.execute(
File "/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/execute.py", line 53, in quick_execute
tensors = pywrap_tfe.TFE_Py_Execute(ctx._handle, device_name, op_name,
KeyboardInterrupt
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/usr/local/lib/python3.10/dist-packages/IPython/core/interactiveshell.py", line 2099, in showtraceback
stb = value._render_traceback_()
AttributeError: 'KeyboardInterrupt' object has no attribute '_render_traceback_'
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py", line 1101, in get_records
return _fixed_getinnerframes(etb, number_of_lines_of_context, tb_offset)
File "/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py", line 248, in wrapped
return f(*args, **kwargs)
File "/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py", line 281, in _fixed_getinnerframes
records = fix_frame_records_filenames(inspect.getinnerframes(etb, context))
File "/usr/lib/python3.10/inspect.py", line 1662, in getinnerframes
frameinfo = (tb.tb_frame,) + getframeinfo(tb, context)
File "/usr/lib/python3.10/inspect.py", line 1620, in getframeinfo
filename = getsourcefile(frame) or getfile(frame)
File "/usr/lib/python3.10/inspect.py", line 829, in getsourcefile
module = getmodule(object, filename)
File "/usr/lib/python3.10/inspect.py", line 878, in getmodule
os.path.realpath(f)] = module.__name__
File "/usr/lib/python3.10/posixpath.py", line 396, in realpath
path, ok = _joinrealpath(filename[:0], filename, strict, {})
File "/usr/lib/python3.10/posixpath.py", line 431, in _joinrealpath
st = os.lstat(newpath)
KeyboardInterrupt
---------------------------------------------------------------------------
KeyboardInterrupt Traceback (most recent call last)
[... skipping hidden 1 frame]
<ipython-input-22-1380ed8ec56a> in <cell line: 12>()
11
---> 12 history = model.fit(training_dataset,
13 steps_per_epoch=steps_per_epoch, validation_data=validation_dataset, validation_steps=validation_steps, epochs=EPOCHS)
/usr/local/lib/python3.10/dist-packages/keras/src/utils/traceback_utils.py in error_handler(*args, **kwargs)
64 try:
---> 65 return fn(*args, **kwargs)
66 except Exception as e:
/usr/local/lib/python3.10/dist-packages/keras/src/engine/training.py in fit(self, x, y, batch_size, epochs, verbose, callbacks, validation_split, validation_data, shuffle, class_weight, sample_weight, initial_epoch, steps_per_epoch, validation_steps, validation_batch_size, validation_freq, max_queue_size, workers, use_multiprocessing)
1741 callbacks.on_train_batch_begin(step)
-> 1742 tmp_logs = self.train_function(iterator)
1743 if data_handler.should_sync:
/usr/local/lib/python3.10/dist-packages/tensorflow/python/util/traceback_utils.py in error_handler(*args, **kwargs)
149 try:
--> 150 return fn(*args, **kwargs)
151 except Exception as e:
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/polymorphic_function.py in __call__(self, *args, **kwds)
824 with OptionalXlaContext(self._jit_compile):
--> 825 result = self._call(*args, **kwds)
826
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/polymorphic_function.py in _call(self, *args, **kwds)
856 # defunned version which is guaranteed to never create variables.
--> 857 return self._no_variable_creation_fn(*args, **kwds) # pylint: disable=not-callable
858 elif self._variable_creation_fn is not None:
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/tracing_compiler.py in __call__(self, *args, **kwargs)
147 filtered_flat_args) = self._maybe_define_function(args, kwargs)
--> 148 return concrete_function._call_flat(
149 filtered_flat_args, captured_inputs=concrete_function.captured_inputs) # pylint: disable=protected-access
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/monomorphic_function.py in _call_flat(self, args, captured_inputs)
1348 # No tape is watching; skip to running the function.
-> 1349 return self._build_call_outputs(self._inference_function(*args))
1350 forward_backward = self._select_forward_and_backward_functions(
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/polymorphic_function/atomic_function.py in __call__(self, *args)
195 if self._bound_context.executing_eagerly():
--> 196 outputs = self._bound_context.call_function(
197 self.name,
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/context.py in call_function(self, name, tensor_inputs, num_outputs)
1456 if cancellation_context is None:
-> 1457 outputs = execute.execute(
1458 name.decode("utf-8"),
/usr/local/lib/python3.10/dist-packages/tensorflow/python/eager/execute.py in quick_execute(op_name, num_outputs, inputs, attrs, ctx, name)
52 ctx.ensure_initialized()
---> 53 tensors = pywrap_tfe.TFE_Py_Execute(ctx._handle, device_name, op_name,
54 inputs, attrs, num_outputs)
KeyboardInterrupt:
During handling of the above exception, another exception occurred:
AttributeError Traceback (most recent call last)
/usr/local/lib/python3.10/dist-packages/IPython/core/interactiveshell.py in showtraceback(self, exc_tuple, filename, tb_offset, exception_only, running_compiled_code)
2098 # in the engines. This should return a list of strings.
-> 2099 stb = value._render_traceback_()
2100 except Exception:
AttributeError: 'KeyboardInterrupt' object has no attribute '_render_traceback_'
During handling of the above exception, another exception occurred:
TypeError Traceback (most recent call last)
[... skipping hidden 1 frame]
/usr/local/lib/python3.10/dist-packages/IPython/core/interactiveshell.py in showtraceback(self, exc_tuple, filename, tb_offset, exception_only, running_compiled_code)
2099 stb = value._render_traceback_()
2100 except Exception:
-> 2101 stb = self.InteractiveTB.structured_traceback(etype,
2102 value, tb, tb_offset=tb_offset)
2103
/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py in structured_traceback(self, etype, value, tb, tb_offset, number_of_lines_of_context)
1365 else:
1366 self.tb = tb
-> 1367 return FormattedTB.structured_traceback(
1368 self, etype, value, tb, tb_offset, number_of_lines_of_context)
1369
/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py in structured_traceback(self, etype, value, tb, tb_offset, number_of_lines_of_context)
1265 if mode in self.verbose_modes:
1266 # Verbose modes need a full traceback
-> 1267 return VerboseTB.structured_traceback(
1268 self, etype, value, tb, tb_offset, number_of_lines_of_context
1269 )
/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py in structured_traceback(self, etype, evalue, etb, tb_offset, number_of_lines_of_context)
1122 """Return a nice text document describing the traceback."""
1123
-> 1124 formatted_exception = self.format_exception_as_a_whole(etype, evalue, etb, number_of_lines_of_context,
1125 tb_offset)
1126
/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py in format_exception_as_a_whole(self, etype, evalue, etb, number_of_lines_of_context, tb_offset)
1080
1081
-> 1082 last_unique, recursion_repeat = find_recursion(orig_etype, evalue, records)
1083
1084 frames = self.format_records(records, last_unique, recursion_repeat)
/usr/local/lib/python3.10/dist-packages/IPython/core/ultratb.py in find_recursion(etype, value, records)
380 # first frame (from in to out) that looks different.
381 if not is_recursion_error(etype, value, records):
--> 382 return len(records), 0
383
384 # Select filename, lineno, func_name to track frames with
TypeError: object of type 'NoneType' has no len()
Evaluate the Model
After training, you will want to see how your model is doing on a test set. For segmentation models, you can use the intersection-over-union and the dice score as metrics to evaluate your model. You’ll see how it is implemented in this section.
def get_images_and_segments_test_arrays():
'''
Gets a subsample of the val set as your test set
Returns:
Test set containing ground truth images and label maps
'''
y_true_segments = []
y_true_images = []
test_count = 64
ds = validation_dataset.unbatch()
ds = ds.batch(101)
for image, annotation in ds.take(1):
y_true_images = image
y_true_segments = annotation
y_true_segments = y_true_segments[:test_count, : ,: , :]
y_true_segments = np.argmax(y_true_segments, axis=3)
return y_true_images, y_true_segments
# load the ground truth images and segmentation masks
y_true_images, y_true_segments = get_images_and_segments_test_arrays()
Make Predictions
You can get output segmentation masks by using the predict() method. As you may recall, the output of our segmentation model has the shape (height, width, 12) where 12 is the number of classes. Each pixel value in those 12 slices indicates the probability of that pixel belonging to that particular class. If you want to create the predicted label map, then you can get the argmax() of that axis. This is shown in the following cell.
# get the model prediction
results = model.predict(validation_dataset, steps=validation_steps)
# for each pixel, get the slice number which has the highest probability
results = np.argmax(results, axis=3)
1/1 [==============================] - 1s 1s/step
Compute Metrics
The function below generates the IOU and dice score of the prediction and ground truth masks. From the lectures, it is given that:
$$IOU = \frac{area_of_overlap}{area_of_union}$$
$$Dice Score = 2 * \frac{area_of_overlap}{combined_area}$$
The code below does that for you. A small smoothening factor is introduced in the denominators to prevent possible division by zero.
def compute_metrics(y_true, y_pred):
'''
Computes IOU and Dice Score.
Args:
y_true (tensor) - ground truth label map
y_pred (tensor) - predicted label map
'''
class_wise_iou = []
class_wise_dice_score = []
smoothening_factor = 0.00001
for i in range(12):
intersection = np.sum((y_pred == i) * (y_true == i))
y_true_area = np.sum((y_true == i))
y_pred_area = np.sum((y_pred == i))
combined_area = y_true_area + y_pred_area
iou = (intersection + smoothening_factor) / (combined_area - intersection + smoothening_factor)
class_wise_iou.append(iou)
dice_score = 2 * ((intersection + smoothening_factor) / (combined_area + smoothening_factor))
class_wise_dice_score.append(dice_score)
return class_wise_iou, class_wise_dice_score
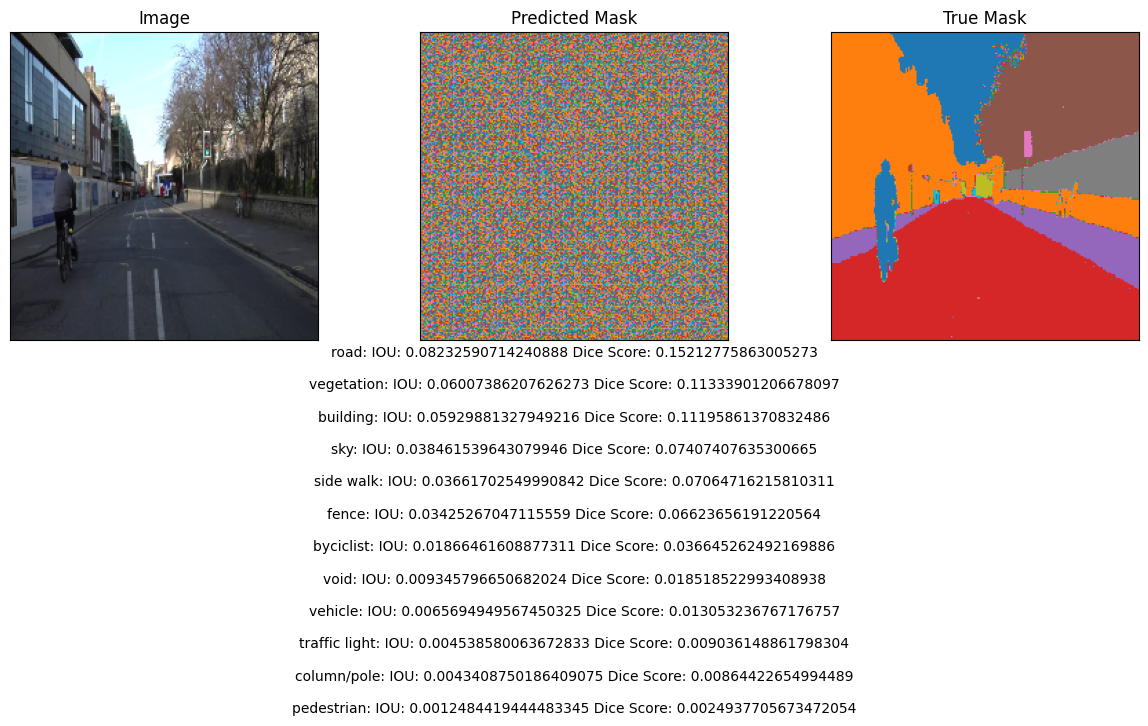
Show Predictions and Metrics
You can now see the predicted segmentation masks side by side with the ground truth. The metrics are also overlayed so you can evaluate how your model is doing.
# input a number from 0 to 63 to pick an image from the test set
integer_slider = 0
# compute metrics
iou, dice_score = compute_metrics(y_true_segments[integer_slider], results[integer_slider])
# visualize the output and metrics
show_predictions(y_true_images[integer_slider], [results[integer_slider], y_true_segments[integer_slider]], ["Image", "Predicted Mask", "True Mask"], iou, dice_score)
Display Class Wise Metrics
You can also compute the class-wise metrics so you can see how your model performs across all images in the test set.
# compute class-wise metrics
cls_wise_iou, cls_wise_dice_score = compute_metrics(y_true_segments, results)
# print IOU for each class
for idx, iou in enumerate(cls_wise_iou):
spaces = ' ' * (13-len(class_names[idx]) + 2)
print("{}{}{} ".format(class_names[idx], spaces, iou))
sky 0.04083781954695585
building 0.05940314385650248
column/pole 0.00625731366426824
road 0.07722537037686515
side walk 0.04513576391280138
vegetation 0.05873526960494369
traffic light 0.009536327205835589
fence 0.02313716958241911
vehicle 0.015889485356294638
pedestrian 0.0064843985589476474
byciclist 0.01881291037752631
void 0.011615167015296822
# print the dice score for each class
for idx, dice_score in enumerate(cls_wise_dice_score):
spaces = ' ' * (13-len(class_names[idx]) + 2)
print("{}{}{} ".format(class_names[idx], spaces, dice_score))
sky 0.07847105241713027
building 0.11214454894068232
column/pole 0.012436806330778769
road 0.14337829854576076
side walk 0.08637301577861232
vegetation 0.11095364685000966
traffic light 0.018892489451142396
fence 0.04522789371927799
vehicle 0.03128191714902713
pedestrian 0.012885244060351781
byciclist 0.03693104040288868
void 0.022963607890468266
That’s all for this lab! In the next section, you will work on another architecture for building a segmentation model: the UNET.